Design Philosophy
When we began discussing the idea of Aido, we explored various options for the design.
Research around robotic aesthetics also shows that humanoid robots face the challenge of the uncanny valley: the hypothesis being that as the appearance of a robot is made more human, there is a threshold beyond which it starts feeling strange and invoke unpleasant emotions.
We wanted to the robot to be mobile and be able to navigate around home on its own. But a biped robot can easily slip into uncanny valley territory.
What could a mobile robot be if not a humanoid?
While exploring options, we came across a ballbot design – where the base of the robot is a single omnidirectional ball on which the robot can navigate. The ballbot base fits a lot of our requirements around mobility, balance & recovery.
We figured with a bit of ergonomic research that the best height for such a robot would be between 3 and 3.5 ft. This meant that the interactions with Aido would seem natural whether you’re standing, lying on a bed or sitting.
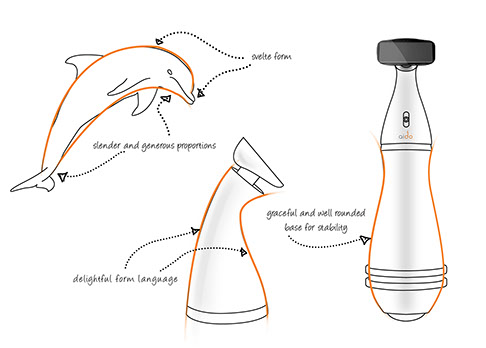
Our industrial designer turned to biology for inspiration: he began studying the dolphin.
Dolphins are highly social animals, living in groups. Dolphins teach, learn and cooperate amongst themselves. They are known to form strong bonds, not only with their species but also with others.
Across several iterations, Aido began to take shape.
Aido would be a ballbot, about 3 to 3.5 feet in height, would have a touchscreen ‘head’ for tactile inputs, would support voice recognition, have a projector for output and special charging rings that could allow it to charge on its own.
And so began the journey of getting Aido’s physical features defined. In coming posts, we’ll talk more about the ballbot design, interface mechanisms and more.